
Research
Structure-based object category recognition
A Microsoft Kinect sensor is used as an input for an object category recognition application, the Kinect is mounted on a ground robot. The main scientific contribution of the proposed technique is the development of a new pipeline to model and recognize objects that a robot can interact with in the course of a mission, basing on Kinect depth data. Objects are recognized not only at the instance level (e.g., a specific chair) but at the category level (e.g., a generic chair).
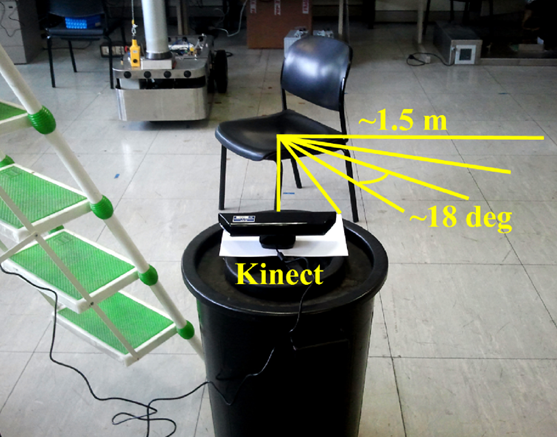
The point cloud gathered by the Kinect is segmented into clusters of two types: tubes and plans. These clusters are associated to the nodes of a graph: the edges of the graph represent the existence of some particular geometrical relation between the clusters corresponding to the connected nodes. Objects are both modelled and recognized by processing these graphs. If the perceived object is not similar to any of the already learnt models, a new one is built. The technique is tested on a real-world dataset of objects: for instance chairs, tables, other robots. As a consequence of recognition, the robot is enabled to interact differently with different kinds of objects, e.g. moving a chair and outflanking a table (too heavy to be moved) to reach its goal position.
Reference paper: Structure-based object representation and classification in mobile robotics through a Microsoft Kinect, Antonio Sgorbissa, Damiano Verda Robotics And Autonomous Systems (RAS), December 2013
![]()